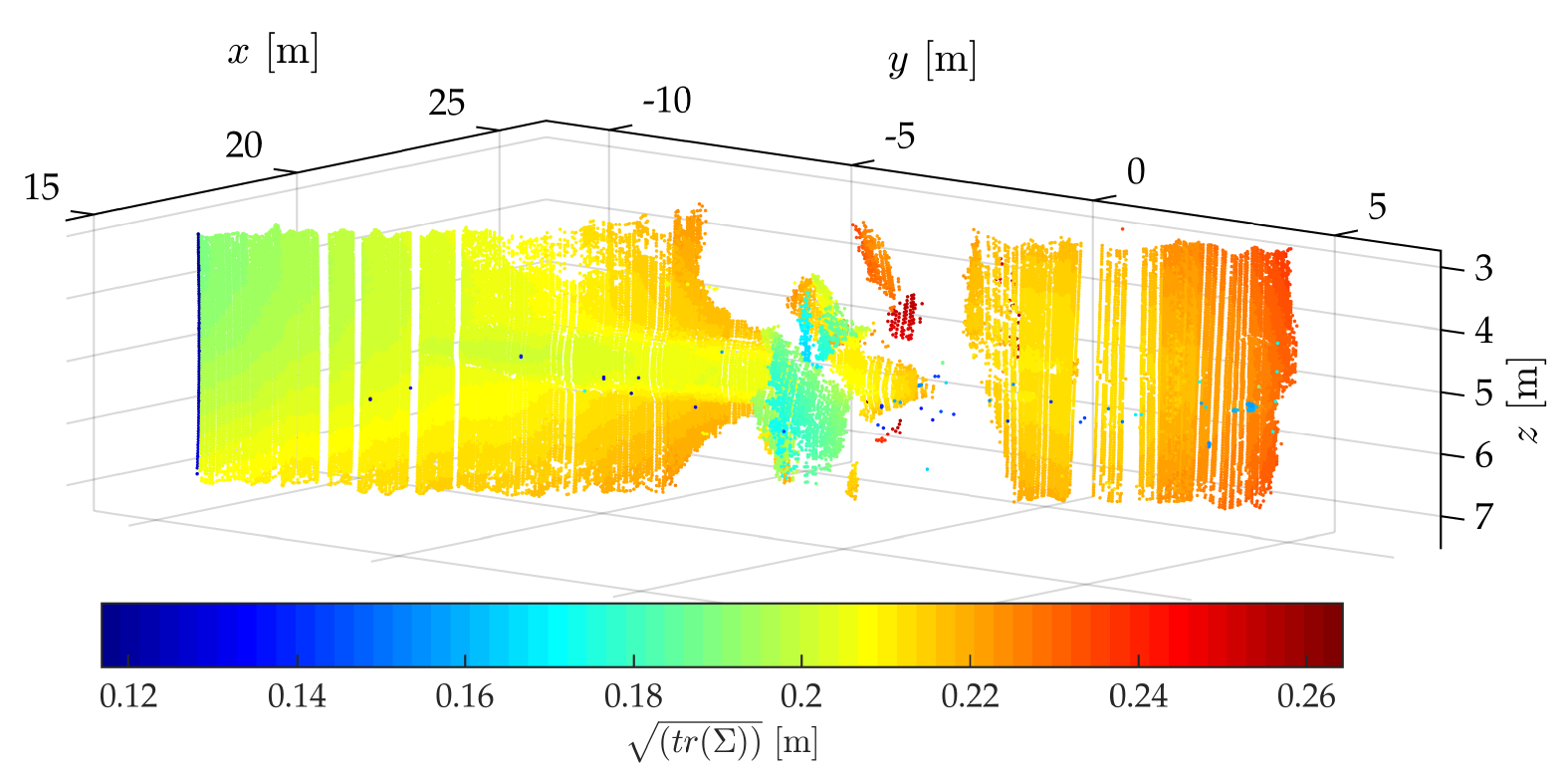
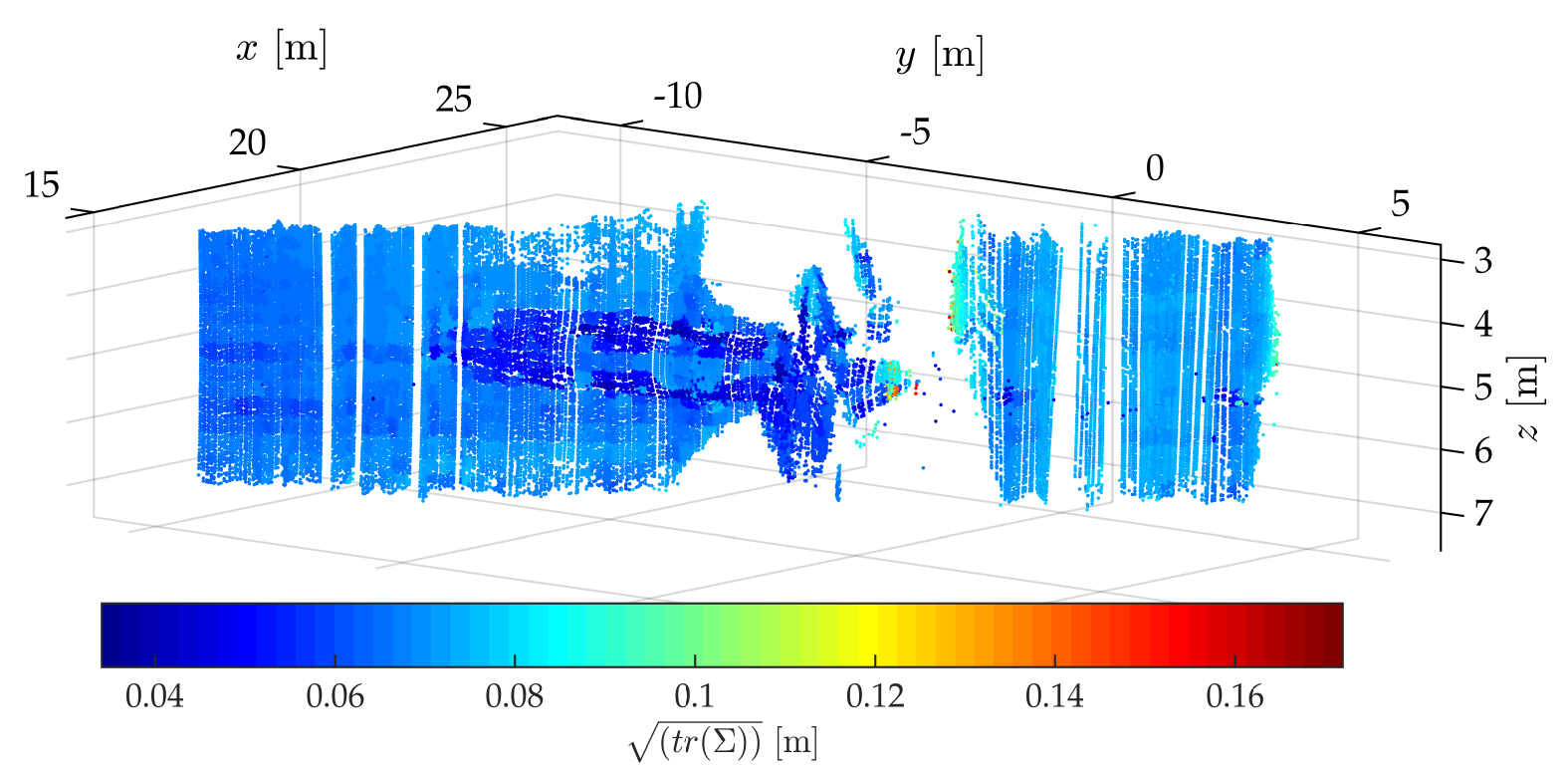
The paper “Dense, Sonar-based Reconstruction of Underwater Scenes” (co-authored with D. Fourie, M. Kaess, and J. Leonard) was just presented at IROS 2019 in Macau. The two figures below, taken from the paper, depict the spatial uncertainty in the maps resulting from odometry- and SLAM-based pose estimates.
For details, check out the publications page.